



The NVIDIA Jetson Nano Developer Kit plugs and plays with the Raspberry Pi V2 Camera! Looky here:

Background
Since the introduction of the first Jetson in 2014, one of the most requested features has been Raspberry Pi camera support. The Jetson Nano has built in support, no finagling required.
The Jetson family has always supported MIPI-CSI cameras. MIPI stands for Mobile Industry Processor Interface, the CSI stands for Camera Serial Interface. This protocol is for high speed transmission between cameras and host devices. Basically it’s a hose straight to the processor, there isn’t a lot of overhead like there is with something like say a USB stack.
However, for those folks who are not professional hardware/software developers, getting access to inexpensive imaging devices through that interface has been, let’s say, challenging.
This is for a couple of reasons. First, the camera connection and wiring is through a connector to which most hobbyists don’t have good access. In addition, there’s a lot of jiggering with the drivers for the camera in the Linux kernel along with manipulation of the device tree that needs to happen before imaging magic occurs. Like I said, pro stuff. Most people take the path of least resistance, and simply use a USB camera.
Raspberry Pi Camera Module V2
At the same time, one of the most popular CSI-2 cameras is the Raspberry Pi Camera Module V2. The camera has a ribbon connector which connects to the board using a simple connector. At the core, the RPi camera consists of a Sony IMX-219 imager, and is available in different versions, with and without an infrared filter. Leaving out the infrared filter in the Pi NoIR camera (NoIR= No Infrared) allows people to build ‘night vision’ cameras when paired with infrared lighting. And they cost ~ $25, lots of bang for the buck!
Are they the end all of end all cameras? Nope, but you can get in the game for not a whole lot of cash.
Note: The V1 Raspberry Pi Camera Module is not compatible with the default Jetson Nano Install. The driver for the imaging element is not included in the base kernel modules.
Jetson Nano
Here’s the thing. The Jetson Nano Developer Kit has a RPi camera compatible connector! Device drivers for the IMX 219 are already installed, the camera is configured. Just plug it in, and you’re good to go.
Installation
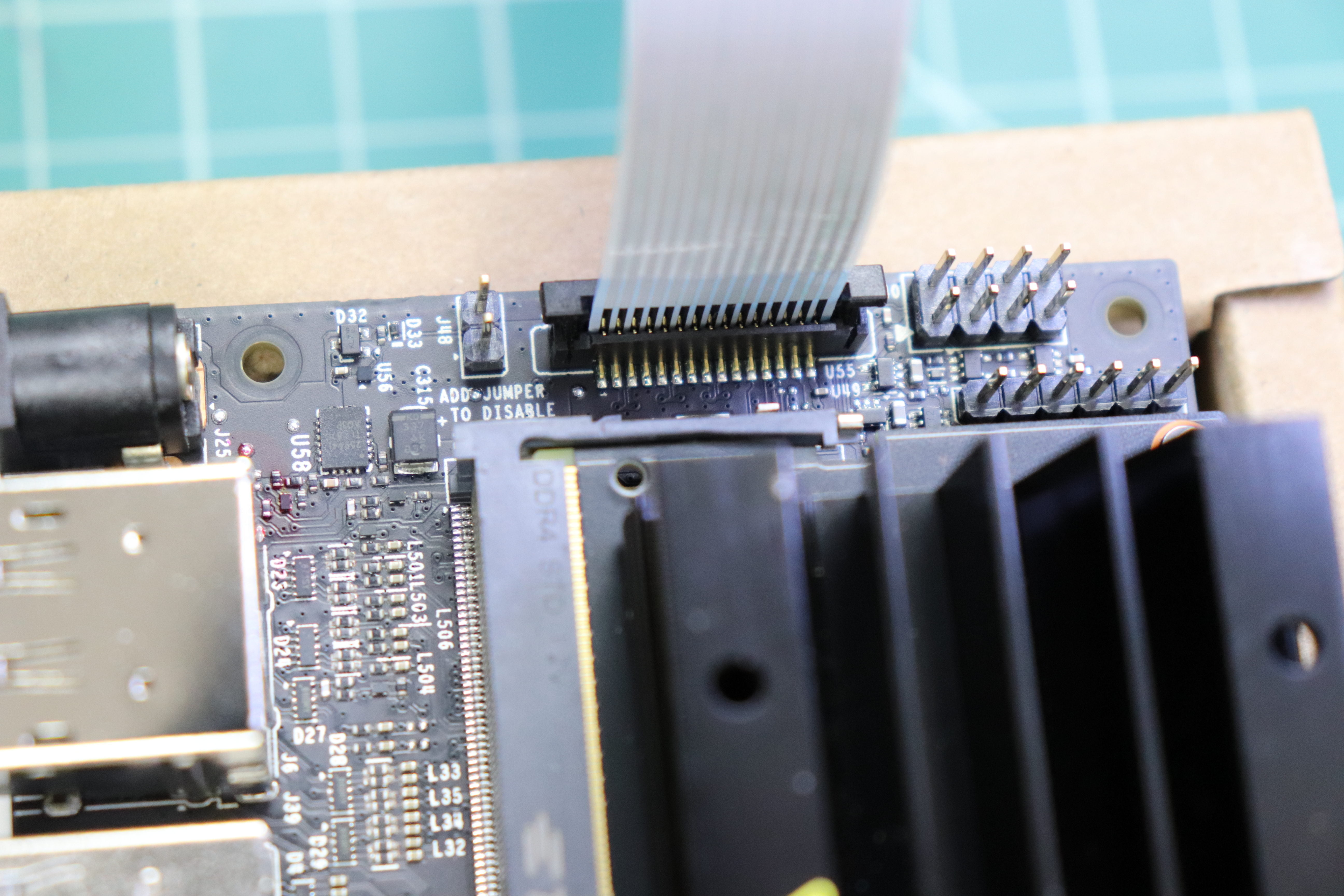
Installation is simple. On the Jetson Nano J13 Camera Connector, lift up the piece of plastic which will hold the ribbon cable in place. Be gentle, you should be able to pry it up with a finger/fingernail. Once loose, you insert the camera ribbon cable, with the contacts on the cable facing inwards towards the Nano module. Then press down on the plastic tab to capture the ribbon cable. Some pics (natch):


Make sure that the camera cable is held firmly in place after closing the tab. Here’s a pro tip: Remove the protective plastic film which covers the camera lens on a new camera before use. You’ll get better images (don’t ask me how I know).
Testing and some Codez
The CSI-Camera repository on Github contains some sample code to interface with the camera. Once installed, the camera should show up on /dev/video0. On the Jetson Nano, GStreamer is used to interface with cameras. Here is a simple command line to test the camera (Ctrl-C to exit):
$ gst-launch-1.0 nvarguscamerasrc ! nvoverlaysinkOn newer Jetson Nano Developer Kits, there are two CSI camera slots. You can use the sensor_mode attribute with nvarguscamerasrc to specify the camera. Valid values are 0 or 1 (the default is 0 if not specified), i.e.
nvarguscamerasrc sensor_mode=0
A more specific example, which takes into account the actual modes of the particular sensor:
$ gst-launch-1.0 nvarguscamerasrc sensor_mode=0 ! 'video/x-raw(memory:NVMM),width=3820, height=2464, framerate=21/1, format=NV12' ! nvvidconv flip-method=0 ! 'video/x-raw,width=960, height=616' ! nvvidconv ! nvegltransform ! nveglglessink -e
This requests GStreamer to open a camera stream 3820 pixels wide by 2464 high @ 21 frames per second and display it in a window that is 960 pixels wide by 616 pixels high. The ‘flip-method’ is useful when you need to change the orientation of the camera because if flips the picture around for you. You can get some more tips in the README.md file in the repository.
There are also a couple of simple ‘read the camera and show it in a window’ code samples, one written in Python, the other C++.
Note: Starting with JetPack 4.3/L4T 32.3.1 the Jetson runs OpenCV 4. This means that if you are using an earlier version of JetPack, you will need to select an earlier release of the CSI-Camera repository. In order to do that, before running the samples:
$ git clone https://github.com/JetsonHacksNano/CSI-Camera.git
$ git checkout v2.0
The third demo is more interesting. The ‘face_detect.py’ script runs a Haar Cascade classifier to detect faces on the camera stream. You can read the article Face Detection using Haar Cascades to learn the nitty gritty. The example in the CSI-Camera repository is a straightforward implementation from that article. This is one of the earlier examples of mainstream machine learning.
Notes
Updated 2-29-2020 Simpler camera test, and information on how to access the different CSI cameras on the Jetson Nano B01 carrier board.
A Logitech C920 webcam is used in the video through the Cheese application.
Demonstration environment:
- Jetson Nano Developer Kit
- L4T 32.1.0
- Raspberry Pi Camera Module V2