

In Part One and Part Two of the RACECAR/J Series, we built the chassis and platform decks. Now it’s time to put them together. Looky here:
Introduction
Building even a simple robot like RACECAR/J usually means several assembly steps. Now that we’ve built the chassis and the platform decks, it’s time to hook up the wiring, install the base electronics, and attach the two together.
If you know your final build configuration, you may want to modify this step to include some of the sensors and electronics that you have chosen. You should consider this step a test fit of the robot parts.
Tools and Parts
Full RACECAR/J Kits and parts are available in the RACECAR/J Store (United States only presently).
Electronics:
- NVIDIA Jetson Development Kit – Jetson TX2 shown in the video
- SparkFun SEN-14001 IMU
Here are a couple of screw types that we use:
- 1/4″ 4-40 machine screws – Attaches the IMU and Jetson Dev Kit to the Platform Deck via the 1/4″ standoffs
- 7/16″ 4-40 machine screws – Attaches the upper platform deck to the lower platform deck via 2″ standoffs
- M3x10mm machine screws – Attaches the lower Platform Deck to the Chassis via the body mount points
For wiring:
- USB 3.0 Cable. 6″ USB B Right Angle to USB A – Amazon Basics USB Hub to Jetson Dev Kit
- USB 2.0 Cable. 6″ USB micro B to USB A – SparkFun SEN-14001 IMU to USB Hub
- Right Angle Plug, 1.7mm ID, 4.755mm OD – Battery power to Amazon Basics USB Hub
- Right Angle Plug, 2.5mm ID, 5.5mm OD – Battery power to Jetson TX1/TX2
- XT-60 to Traxxas Male Converter – Attaches Traxxas battery to ESC
The wiring varies of course depending on which battery you choose to power the electronics.
Here’s the toolset in the video:
For consumables, we use some electrical tape, 4″ and 8″ zip ties, and some 3M Dual Lock tape.
For this build, the wire routing is meant mostly to keep any wires from contact with the drive train during testing. Once the installation of the rest of the sensors and electronics is complete, that is a good time to go over the final wire routing and attachment. In other words, consider this a throw away attempt.
Installation
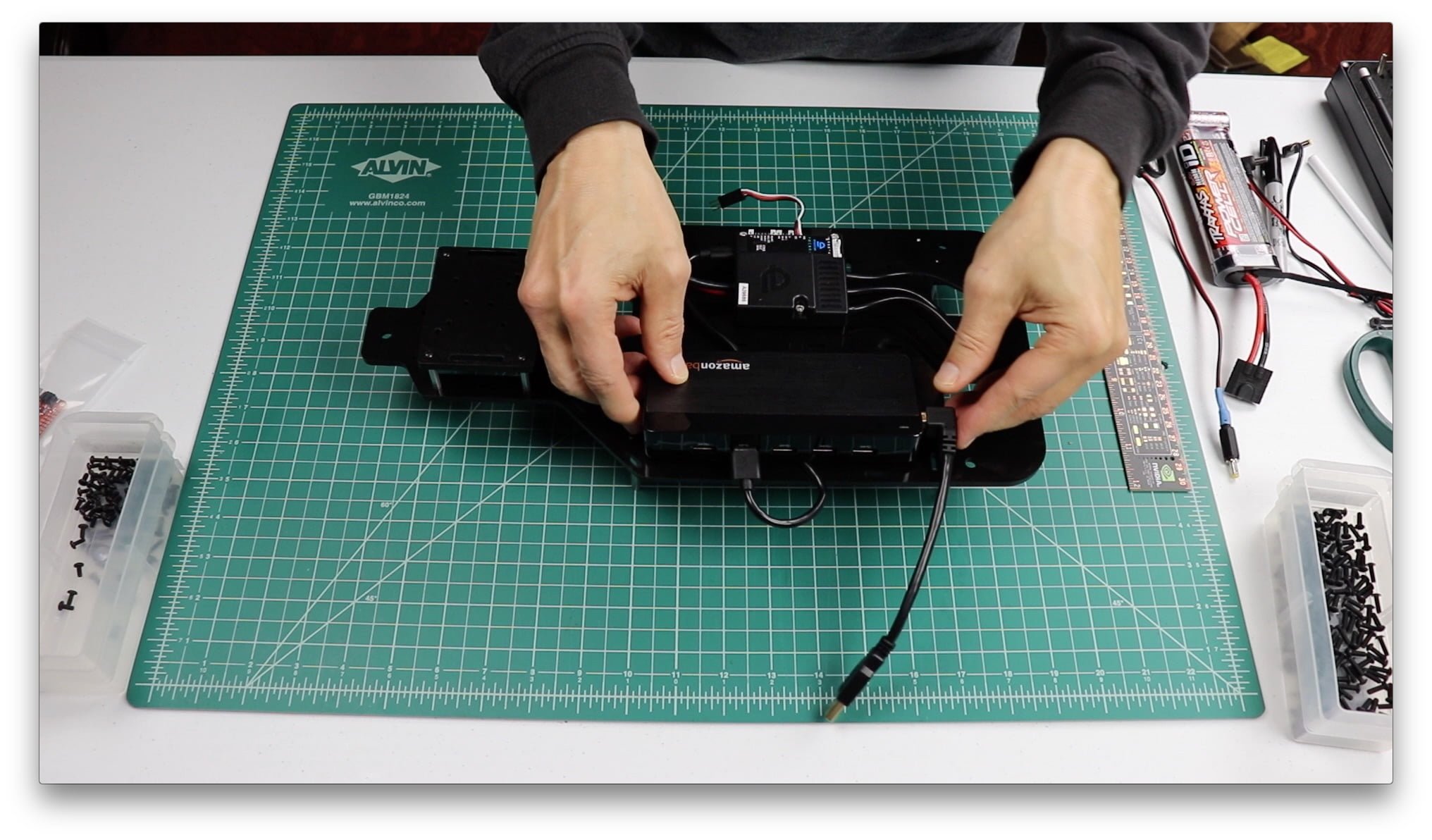
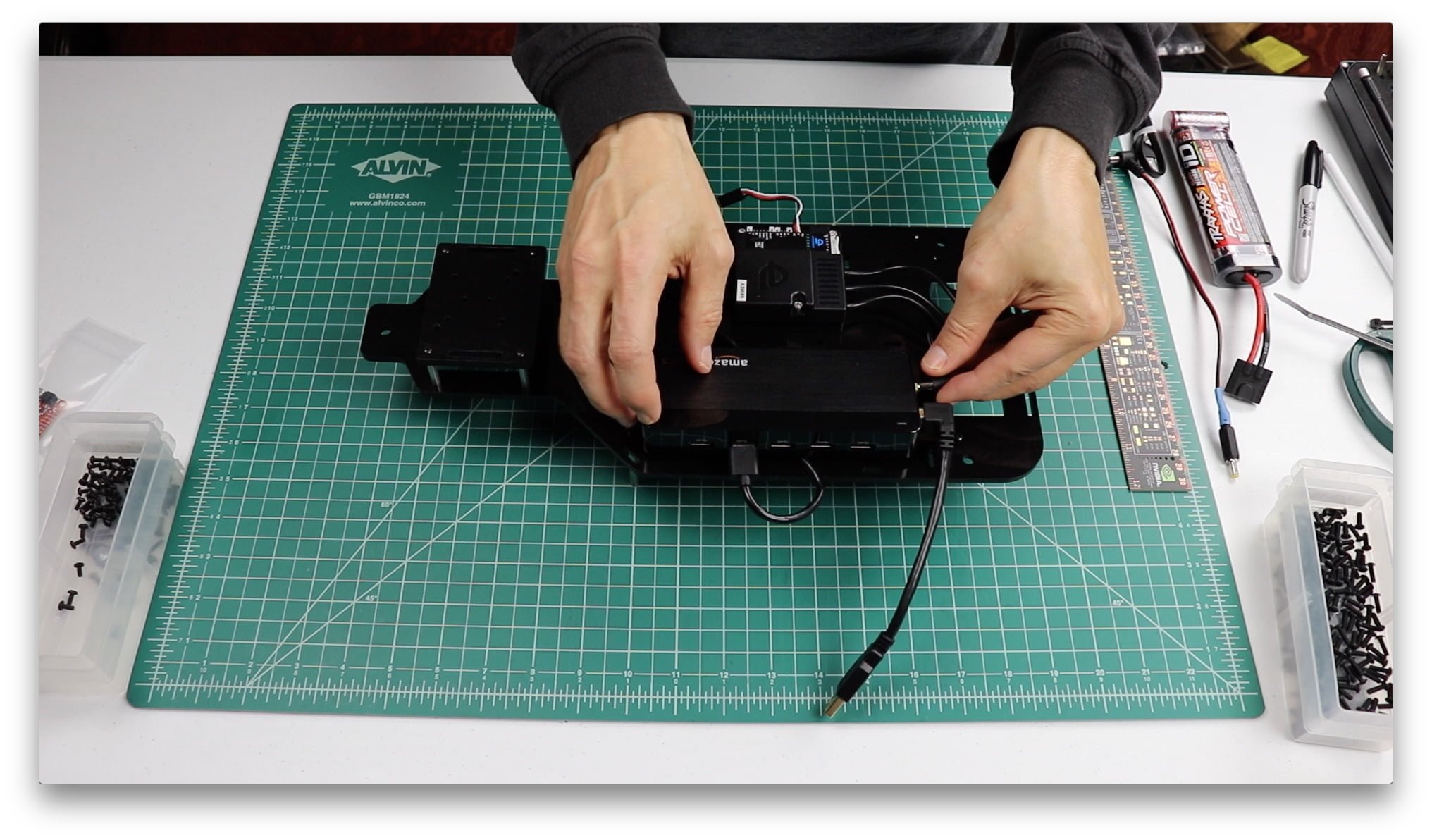
First, prepare the lower Platform Deck by installing the USB 3.0 Cable and power cable to the Amazon Basics USB Hub.
There are three motor wires and the steering servo cable which must be connected to the electronic speed controller.


FOCBOX replaced by VESC6 Plus
Important Note: The FOCBOX mentioned below and in the video is no longer in production. Currently the RACECAR/J Kits are shipping with the VESC 6 Plus.
Please see: Install VESC 6 Plus for installation instructions. The mounting holes and wiring are slightly different than that shown in the video, but it is the very similar. You will not need an extra servo header as mentioned below, as the servo wire connects directly to the servo cable from the VESC6+.
Here’s what it looks like after the motor cables are attached when attaching the steering servo cable. Notice that a zip tie helps keep the motor wires in place:

For this particular electronic speed controller, we install a XT-60 to Traxxas Male converter cable and the battery for the chassis.

Place the Platform Decks on the body mounting points. Install the IMU using 4 1/4″ 4-40 machine screws:

Then attach the Jetson Development Kit using 4 1/4″ 4-40 machine screws:

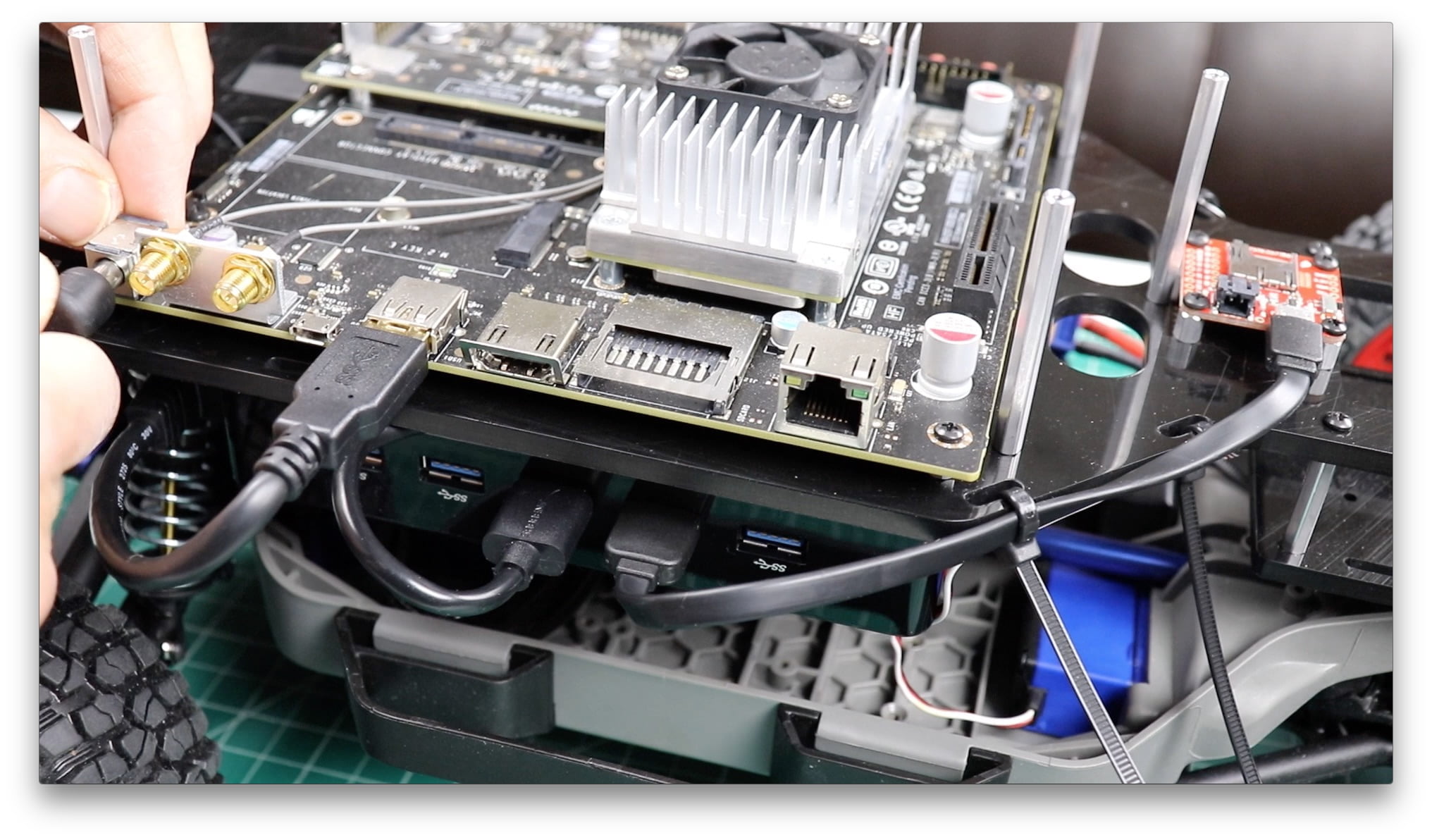
The next step is to connect the USB cable for the IMU, connect the USB Hub to the Jetson, and connect the battery power cable to the Jetson:


Then attach the Lower Platform Deck to the chassis using 4 M3x10mm machine screws:

Usually I wait to attach the Platform Deck until after initial testing in case I need to access the wiring.
Finally, attach the Top Platform Deck to the 2″ standoffs using 5 7/16″ 4-40 machine screws. There are a couple of strips of 3M Dual Lock added to hold a battery:

This is the initial configuration of the finished assembly.
Conclusion
The base of the robot is now assembled, and we’re ready to start loading software on to the Jetson to control it. Now we are ready to install the ROS software and RACECAR packages!